Filters¶
Pyropython contains a few simple routines for filtering data. Most users will still probably want to do any needed filtering pof data manually. By default, no filters are used.
The filters are invoked by the filter keyword in the variable definitions under simulation and experiment keywords in the configuration file. Available filters are:
- ma - moving average
- median - median filter
- gp - gaussian process
Both the moving average and median filters accept an optional width parameter. The parameter can be given on the data line with the filter_opts keyword as follows:
MLR35:
fname: 'Experimental_Data/Birch_35kW.csv'
dep_col_name: 'MLR'
header: 1
filter_type: median
filter_opts:
width: 31
The default width for median and moving average filters is 10 samples. Note that boths median and moving average filters assume uniform sampling of the input.
The Gaussian process filter works by fitting a Gaussian process model to the data and then using the expected value of the gaussian priocess as the filtered value (Gaussian process regression). Fitting a model can take up even several minutes for datasets with thousands of samples. However, the Gaussian process “filter” automatically determines its parameters and does not assume uniform sampling.
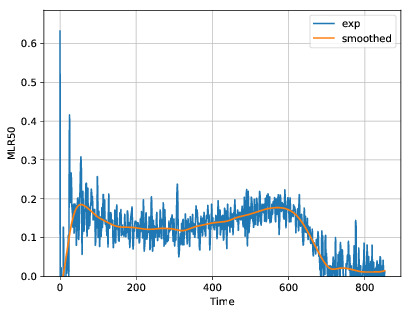
The effect of the filter can be investigated using the plot_pyro tool. See the section Plotting for more information. For example, the following input (borrowed from Birch_Cone_Example)
MLR35:
fname: 'Experimental_Data/Birch_35kW.csv'
dep_col_name: 'MLR'
header: 1
filter_type: gp
Produces the following result: (The image is produced by plot_pyro)